


设计思路:
①:判断是否有人接近,有人电机正转,离开反转。
②:按下按钮,反转。
仿真元器件清单:
AT89C51
BUTTON
CAP
CAP-ELEC
CRYSTAL
RES
1N4007
L298
MOTOR
实现程序:
//功能:自动感应垃圾桶(判断是否有人接近,有人电机正转,离开反转)
#include <reg51.h> //包含头文件reg51.h,定义了51单片机的专用寄存器
sbit hw=P0^1; //红外控制信号输入端
sbit P1_3=P1^3; //电机驱动控制端
sbit P1_4=P1^4; //电机驱动控制端
sbit P1_5=P1^5; //电机驱动控制端
//函数名:delay
//函数功能:实现软件延时
//形式参数:无符号整型变量i,控制空循环的循环次数
//返回值:无
void delay(unsigned int i) //延时函数
{
unsigned int k;
for(k=0;k<i;k++);
}
void main()
{
bit flag; //桶盖打开标志位变量,为1表示桶盖打开,否则表示桶盖关闭 0 1
flag=0; //桶盖关闭标志
while(1)
{
if((hw==1)&&(flag==0))
{
P1_3=1; //电机运转,控制打开桶盖
P1_4=0;
P1_5=1;
delay(20000); //延时,等待桶盖打开完成
P1_5=0; //电机停转,保持桶盖打开状态
flag=1; //设置桶盖打开标志
}
else if((hw==0)&&(flag==1))
{
P1_3=0; //电机运转,控制打开桶盖
P1_4=1;
P1_5=0;
delay(20000); //延时,等待桶盖打开完成
P1_5=1; //电机停转,保持桶盖打开状态
flag=0; //设置桶盖打开标志
}
}
}
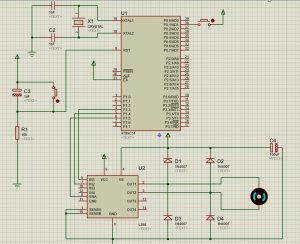
实现仿真图:
实现效果视频:
进阶程序:
//功能:自动感应垃圾桶(判断是否有人接近,有人电机正转,离开反转)
#include "reg51.h" //包含头文件reg51.h,定义了51单片机的专用寄存器
sbit hw=P0^1; //红外控制端
sbit P1_3=P1^3; //电机驱动控制端
sbit P1_4=P1^4; //电机驱动控制端
sbit P1_5=P1^5; //电机驱动控制端
//函数名:delay
//函数功能:实现软件延时
//形式参数:无符号整型变量i,控制空循环的循环次数
//返回值:无
void delay(unsigned int i) //延时函数
{
unsigned int k;
for(k=0;k<i;k++);
}
void main()
{
bit flag; //桶盖打开标志位变量,为1表示桶盖打开,否则表示桶盖关闭
flag=0; //桶盖关闭标志
while(1)
{
if((hw==1)&&(flag==0))
{ P1_3=1; //电机运转,控制打开桶盖
P1_4=0;
P1_5=1;
delay(20000); //延时,等待桶盖打开完成
P1_5=0; //电机停转,保持桶盖打开状态
flag=1; //设置桶盖打开标志
}
else if(hw==0&&flag==1)
{
P1_3=0; //电机反向运转,关闭桶盖
P1_4=1;
P1_5=1;
delay(20000); //延时,等待桶盖关闭完成
P1_5=0; //电机停转,保持桶盖关闭状态
flag=0; //设置桶盖关闭标志
}
}
}
Comments NOTHING